Ningún producto
Motores
-
Controladores
Controladores de motores Pasos a Paso y DC
-
Motores brushless
Modelos de motores brushless para modelismo y robótica. Quieres hacer tu própio UAV? Aqui tienes los motores
-
Motores DC
Encuentra todo tipo de motores de corriente contínua para tus proyectos.
-
Motores Paso a Paso
Motores Paso a Paso para contruciones Roboticas, proyecto DIY, controladores
-
Servomotores
Servomotores para robótica y electrónica en general
- Accesorios
-
 Motor DC 12V 37x52mm - 30:1 DCM-0034
Motor DC 12V 37x52mm - 30:1 DCM-0034Motor con reductora de Pololu de gran potencia, 12V y eje de 6mm.
29,95 € -
 Motor micro metal 30:1 HP con eje extendido DCM-0033
Motor micro metal 30:1 HP con eje extendido DCM-0033Motor DC Micro Metal de corriente contínua de alta potencia con reductora 30:1 para uso en robótica.
19,90 € -
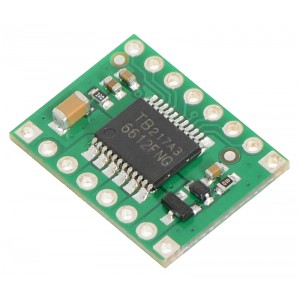 Controlador de motores TB6612FNG DCM-0032
Controlador de motores TB6612FNG DCM-0032Controlador de motores TB6612FNG de dos canales de 1A (3A max)
4,95 € -
 Motor micro metal 50:1 HP con eje extendido DCM-0031
Motor micro metal 50:1 HP con eje extendido DCM-0031Motor DC Micro Metal de corriente contínua de alta potencia con reductora 50:1 para uso en robótica. Série HP (High Power)
19,90 € -
 Controlador de motores paso a paso 3.5A (TB6600) MOT-0022
Controlador de motores paso a paso 3.5A (TB6600) MOT-0022Driver de motores paso a paso de alta potencia 3.5A basado en el chip TB6600
19,95 € -

-
 Comprobador de servos 3 canales PRO-0165
Comprobador de servos 3 canales PRO-0165Comprobador de servos RC de radiocontrol pequeño, sencillo y eficaz con tres canales de salida
1,95 € -
 Motor paso a paso 28BYJ-48 (5V) con driver ULN2003 MOT-0021
Motor paso a paso 28BYJ-48 (5V) con driver ULN2003 MOT-0021Motor paso a paso 28BYJ-48 + driver ULN2003 de 64 pasos por vuelta con alimentación a 5V
2,95 € -

-
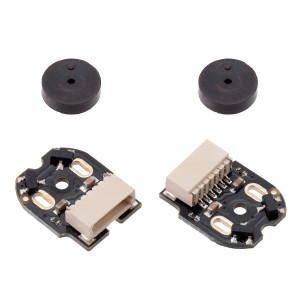 Encoders para motores micro metal (12CPR) RUE-0010
Encoders para motores micro metal (12CPR) RUE-0010Pareja de encoders magnéticos de 12CPR diseñados para los motores micro metal de Pololu
8,50 € -
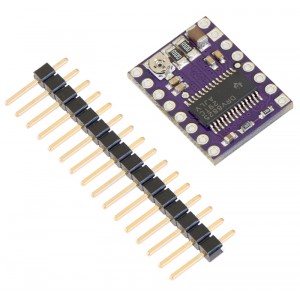 Controlador de alta corriente DRV8825 MOT-0020
Controlador de alta corriente DRV8825 MOT-0020Controlador de motores paso a paso de alta corriente DRV8825
12,50 € -
 Kit encoders para motores micro metal DCM-0028
Kit encoders para motores micro metal DCM-0028Pareja de encoders especialmente diseñados para los motores micro metal de Pololu
11,95 € -
 RAMPS Mega Shield v1.4 ARD-0091
RAMPS Mega Shield v1.4 ARD-0091Controladora de motores paso a paso RepRap Arduino Mega Pololu Shield (RAMPS) para Arduino MEGA
5,20 € -
 Soporte de eje 6 mm / M3 DCM-0027
Soporte de eje 6 mm / M3 DCM-0027Soporte de eje universal de metal de 6mm y agujeros de tornillo M3
9,90 € -
 Soporte de eje 5 mm / M3 DCM-0026
Soporte de eje 5 mm / M3 DCM-0026Soporte de eje universal de metal de 5mm y agujeros de tornillo M3
8,50 € -
 Soporte de eje 3 mm / M3 DCM-0025
Soporte de eje 3 mm / M3 DCM-0025Soporte de eje universal de metal de 3mm y agujeros de tornillo M3
8,90 € -
 Motor con reductora 70:1 con encoder DCM-0022
Motor con reductora 70:1 con encoder DCM-0022Motor Gearmotor de Pololu de gran potencia, 12V y eje de 6mm con un encoder integrado y reductora.
49,55 € -
 Motor micro metal 150:1 HP con eje extendido DCM-0024
Motor micro metal 150:1 HP con eje extendido DCM-0024Motor DC Micro Metal de corriente contínua de alta potencia con reductora 150:1 para uso en robótica.
19,90 € -
 Motor micro metal 75:1 HP con eje extendido DCM-0023
Motor micro metal 75:1 HP con eje extendido DCM-0023Motor DC Micro Metal de corriente contínua de alta potencia con reductora 75:1 para uso en robótica.
19,90 € -

-

-
 Adafruit Servo Hat para Raspberry Pi RSP-0025
Adafruit Servo Hat para Raspberry Pi RSP-0025Expansión para controlar hasta 16 servomotores con Raspberry pi
20,50 € -
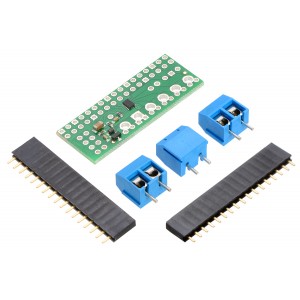 Controlador de motores DRV8835 para Raspberry Pi B+ RSP-0017
Controlador de motores DRV8835 para Raspberry Pi B+ RSP-0017Controla motores directamente desde los GPIO de tu Raspberry Pi B+
21,95 € -
 Controlador de bajo voltaje DRV8834 MOT-0016
Controlador de bajo voltaje DRV8834 MOT-0016Controlador de motores paso a paso de 1.5A y bajo voltaje
9,95 € -
 Motor paso a paso 14 Kg/cm, NEMA 23 MOT-0015
Motor paso a paso 14 Kg/cm, NEMA 23 MOT-0015Potente motor paso a paso unipolar con una fuerza de 14 Kg/cm y 200 pasos por vuelta.
59,95 € -
 Micro servomotor S05NF SRV-0014
Micro servomotor S05NF SRV-0014Pequeño servomotor de tan solo 20 gramos y 2.8kg/cm de fuerza
12,95 € -
 Servomotor 360 grados SRV-0013
Servomotor 360 grados SRV-0013Servomotor capaz de girar 360 grados con una fuerza de 20 Kg/cm
18,90 € -
 Driver Pololu A4988 StepStick (Prusa / Reprap) MOT-0014
Driver Pololu A4988 StepStick (Prusa / Reprap) MOT-0014Controlador Pololu A4988 stepstick para Prusa/Reprap o similar
10,30 € -
 Motor paso a paso 3.2 Kg/cm NEMA 17 MOT-0013
Motor paso a paso 3.2 Kg/cm NEMA 17 MOT-0013Motor muy preciso ideal para montar tu impresora 3D Prusa Mendel o similar, 200 pasos por vuelta.
27,50 € -
 Ardumoto - Driver de motores para Arduino DCM-0018
Ardumoto - Driver de motores para Arduino DCM-0018Controlador de motores para Arduino basado en L298 con capacidad para 2 Amperios por salida
19,95 € -
 Motor paso a paso 9 Kg/cm MEMA 23 MOT-0011
Motor paso a paso 9 Kg/cm MEMA 23 MOT-0011Potente motor paso a paso bipolar con una fuerza de 9 Kg/cm y 200 pasos por vuelta.
46,90 € -
 Soportes de metal para motor DC DCM-0009
Soportes de metal para motor DC DCM-0009Soporte de metal para los motores 37D mm gearmotors de Pololu.
9,50 €
Motores DC y Motores Paso a Paso
Los motores DC y los motores paso a paso son un componente esencial para cualquier proyectos de electrónica o proyecto de robótica. Permite transformar la corriente en movimiento mecánico. Son muy fáciles de hacer funcionar utilizando el controlador de motor adecuado. Los motores eléctricos son generalmente muy eficientes en cuanto a consumo de energía y pueden generar grandes fuerzas.
Especialmente con la plataforma Arduino, existen muchos proyectos con motores y Arduino muy bien documentados.
¿Qué es un motor DC?
Los motores DC, también llamado motor de corriente continua son dispositivos electromecánicos que trasforman la energía de entrada en movimiento mecánico. su estructura se basa en un cuerpo con imanes fijos (estator) que contiene un eje central que gira (rotor). Un motor DC generalmente es bastante sencillo y utiliza pocas piezas. Para los contactos eléctricos internos, normalmente utilizan escobillas, que se desgastan con el uso y el tiempo.
Un motor DC gira cuando se le aplica una determinada corriente y voltaje. Se le puede cambiar la dirección de giro invirtiendo la polaridad de su alimentación o mediante controladores de motores especializados.
¿Qué es un motor paso a paso?
Un motor paso a paso funciona de una forma diferente ya que necesita una serie de pulsos para funcionar y no se le puede aplicar un voltaje directamente como ocurre con los motores DC.
La gran ventaja de los motores paso a paso es que puede posicionarse de forma precisa gracias al uso de pulsos de control. Lo que significa que es capaz de girar un determinado número de grados en función de los pulsos digitales que lo controlen.
Un motor paso a paso necesita de un controlador específico que sea capaz de gestionar tanto los pulsos de control como la corriente máxima permitida.
Motores paso a paso Unipolares
Los motores unipolares suelen tener 5 o 6 cables de salida. Este tipo de motores se caracteriza por ser más simple de controlar, estos utilizan un cable común a la fuente de alimentación y posteriormente se van colocando las otras líneas a tierra en un orden específico para generar cada paso, si tienen 6 cables es porque cada par de bobinas tienen un común separado, si tiene 5 cables es porque las cuatro bobinas tienen un polo común; un motor unipolar de 6 cables puede ser usado como un motor bipolar si se deja las líneas del común al aire.
Motores paso a paso Bipolares
Estos motores paso a paso tienen generalmente 4 cables de salida. Necesitan ciertos trucos para ser controlados debido a que requieren del cambio de dirección de flujo de corriente a través de las bobinas en la secuencia apropiada para realizar un movimiento.









